全文转载自COMSOL博客,本文非常实用,尤其是第二部分。原文:如何模拟电动磁悬浮装置 | COMSOL 博客
第一部分案例文件下载:电动悬浮装置 (comsol.com)
- 以下文件适用于5.6版本,之前版本请移步上述链接下载
- electrodynamic_levitation_device.zh_CN.mph – 11.94MB 中文
- electrodynamic_levitation_device_data.zh_CN.txt – 0MB 中文
- electrodynamic_levitation_device_parameters.zh_CN.txt – 0MB 中文
- models.acdc.electrodynamic_levitation_device.zh_CN.pdf – 2.59MB 中文
第二部分案例下载:电动轮磁悬浮二维模型 (comsol.com)
- 注意:以下文件适用于5.5版本,5.6版本兼容性未测试
- edw_maglev_55.pdf – 0.95MB
- edw_maglev_55.pptx – 10.02MB
- edw_maglev_omega_step_55.mph – 26.04MB
- edw_maglev_velocity_sweep_55.mph – 6.82MB
(本处补充于2022.12.19)官方又更新了6.0和6.1版本的案例文件:
- 注意:以下文件适用于6.1版本
- electrodynamic_levitation_device.mph – 12.03MB
- electrodynamic_levitation_device_data.txt – 0MB
- electrodynamic_levitation_device_parameters.txt – 0MB
- models.acdc.electrodynamic_levitation_device.pdf – 1.5MB
- electrodynamic_levitation_device.zh_CN.mph – 8.28MB 中文
- electrodynamic_levitation_device_data.zh_CN.txt – 0MB 中文
- electrodynamic_levitation_device_parameters.zh_CN.txt – 0MB 中文
- models.acdc.electrodynamic_levitation_device.zh_CN.pdf – 2.51MB 中文
- 注意:以下文件适用于6.0 版本:
- electrodynamic_levitation_device.mph – 11.79MB
- electrodynamic_levitation_device_data.txt – 0MB
- electrodynamic_levitation_device_parameters.txt – 0MB
- models.acdc.electrodynamic_levitation_device.pdf – 1.51MB
- electrodynamic_levitation_device.zh_CN.mph – 8.31MB 中文
- electrodynamic_levitation_device_data.zh_CN.txt – 0MB 中文
- electrodynamic_levitation_device_parameters.zh_CN.txt – 0MB 中文
- models.acdc.electrodynamic_levitation_device.zh_CN.pdf – 2.53MB 中文
如何模拟电动磁悬浮装置 | COMSOL 博客
本处以两个案例讲解。
当导体材料附近存在时变磁场时,会发生电动磁悬浮现象。在本篇博客文章中,我们将通过两个示例来演示如何模拟这一现象。这两个示例分别为电动磁悬浮装置的 TEAM 标准问题和电动悬浮轮。
什么是电动磁悬浮?
永磁体或载流线圈在旋转和/或移动时会产生时变磁场,此时附近的导体便会发生电动磁悬浮现象。这是因为时变磁场会在导体中引起涡流,并使其产生相反的磁场,进而导致导体材料和磁源之间产生排斥力。这一过程是所有磁悬浮系统的基本工作原理。

一块磁铁悬浮在超导体上方。图像由 Julien Bobroff 自行拍摄。已获 CC BY-SA 3.0 许可,通过 Wikimedia Commons 共享。
分析电动磁悬浮的标准问题
我们首先来看看一个基于瞬态电磁分析方法(TEAM)问题 28:电磁悬浮装置的基准模型。该模型包含了一个铝制的导电圆盘,圆盘下方是两个圆柱形的同心线圈,两个线圈承载着方向相反的正弦电流。模型的横截面图和尺寸如下图所示。
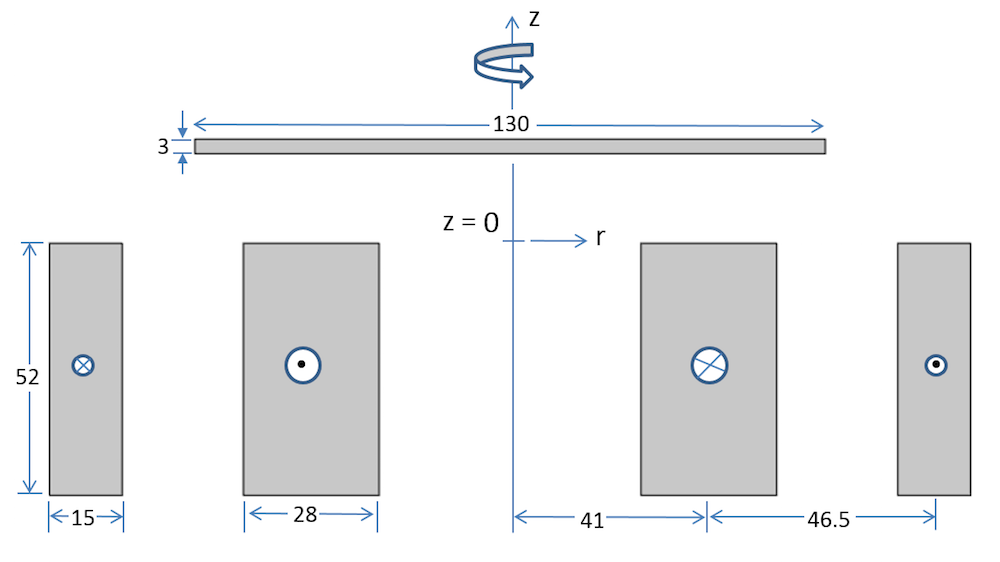
同心线圈和铝盘的横截面视图。所有尺寸均采用毫米为单位。
下图为电动磁悬浮装置的三维模型。
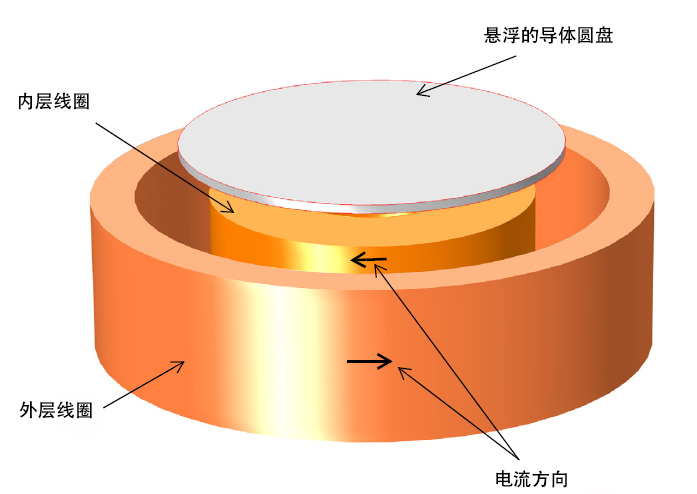
电动悬浮装置的三维模型,图像显示了悬浮的圆盘和两个同心线圈(承载的时变电流方向相反)。
我们在 COMSOL Multiphysics® 软件中使用了二维轴对称几何来对磁悬浮设备进行模拟。由于设备中存在时变电流和感应涡流,所以我们选择使用 AC/DC 模块中的磁场 接口来模拟磁场。此外,我们还使用了均匀多匝线圈 模型中的单个线圈 特征对承载反方向电流的线圈进行模拟,并通过计算力 特征计算出了铝板中的电动力,该特征计算出了麦克斯韦应力张量。
借助全局常微分和微分代数方程 接口,我们将铝板的刚体动力学以常微分方程(ordinary differential equation,简称 ODE)组进行求解。位置和速度的一阶常微分方程为:
由于电磁力会随着铝板和线圈之间距离的变化而不断改变,因此我们必须对磁场 接口进行求解,以获取铝板位置的动态变化数据。考虑到这一点,我们还使用了移动网格 接口来模拟铝板的移动。在完成对振荡圆盘位置的仿真研究后,我们将仿真结果与 TEAM 基准数据进行了比较,如下图所示。
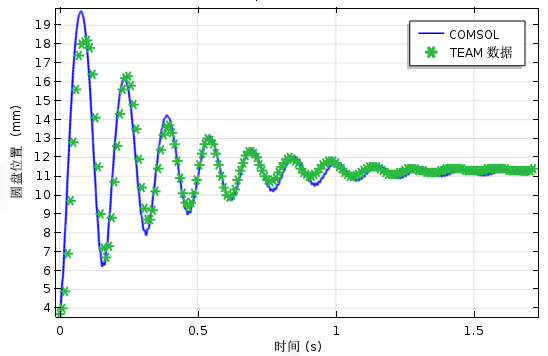
仿真结果与 TEAM 数据的对比。图像展示了铝板垂直振荡和时间的函数关系。

如何模拟电动磁悬浮装置 | COMSOL 博客 动画演示了 0.6 秒内导电圆盘在两个同心线圈上方的振荡情况。
在 COMSOL Multiphysics® 中模拟电动轮装置
磁源的机械旋转(例如径向磁化的 Halbach 转子)会在被动导电导轨(例如铝)上方引起感应涡电流。涡电流进而会产生与源磁场相反的磁场,在两个磁场的相互作用下,同时产生了升力与推力。此类装置被称为电动悬浮轮(electrodynamic wheel,简称 EDW)。
下图展示了 EDW 悬浮概念在高速运输领域中的应用。相对滑移速度 sl 决定了装置是产生推力还是制动力,它是圆周速度 vc 与平移速度 vx 之差,即 sl = vc — vx,其中 vc = ωmro 且 ωm = ωeP。ωm 在此处表示转子的机械角速度,ωe 表示电角速度,P 表示 Halbach 转子中的极对数量。
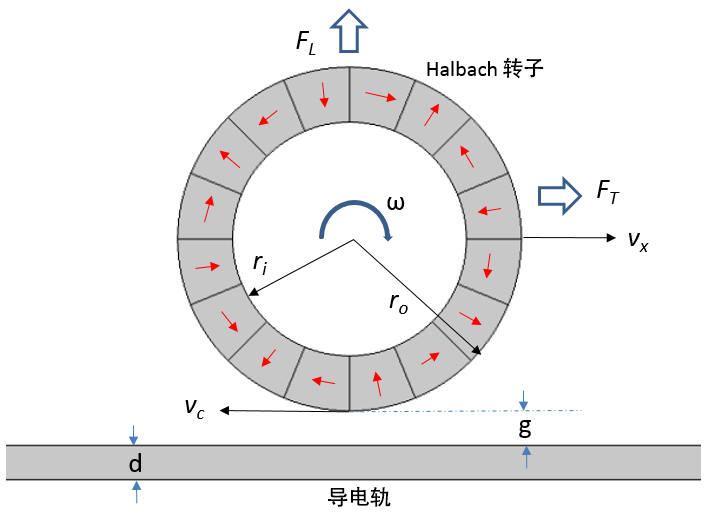
包含四个极对式 EDW 的磁悬浮火车的概念设计图,图像描绘了导电轨道以及旋转和/或行进中的 Halbach 转子。
如果圆周速度大于平移速度(相对滑移速度为正),则系统产生推力。若情况相反,则产生制动力。
通过使用二维和三维的旋转机械,磁 接口,我们可以在一个模型中同时模拟平移和旋转运动。具体操作包括:首先使用指定旋转速度 特征来定义旋转运动,然后使用符号相反的速度(洛伦兹) 项来描述导电轨道上磁悬浮系统(Halbach 转子)的平移运动,接着使用默认的安培定律 特征来模拟永磁体,同时将剩余磁通密度设为 Br = 1.42[T]。由于磁化方向为径向或沿方位角方向,方便起见,我们选择使用圆柱坐标系。
最后,我们通过执行瞬态仿真来求解转子机械角速度的阶跃变化。升力和推力随时间的变化情况如下所示,在这里,我们使用了两种不同的方法对这两种力进行计算,分别是麦克斯韦应力张量(使用“计算力”特征)和洛伦兹法。


升力(左图)和推力(右图)与时间的函数关系,两张图像中均显示了由麦克斯韦应力张量和洛伦兹法计算出的结果。
在第二步中,我们针对一定范围的平移速度执行了多次稳态仿真。当没有旋转运动,或者圆周速度小于平移速度时,则会产生曳力。下图显示了不同速度对应的升力和曳力的模拟结果。


磁浮系统中的升力(左图)和曳力(右图)与速度的函数关系,两张图像中均显示了由麦克斯韦应力张量和洛伦兹法计算出的结果。

如何模拟电动磁悬浮装置 | COMSOL 博客 动画演示了空气和磁铁中磁通密度的表面图,导轨中的电流密度和磁矢势 Az 的等值线图,同时还绘制了 Halbach 转子的顺时针旋转和场的相互作用。
电动磁悬浮装置模拟总结
在本篇博客文章中,我们演示了如何使用 COMSOL Multiphysics 和 AD/DC 模块来模拟两种类型的电动磁悬浮装置。同时我们还探讨了 TEAM 问题 28:电动悬浮装置,并将仿真结果与文献中的实验数据进行了比较。此外,我们还详细解释了电动轮磁悬浮系统的工作原理。并针对角速度的阶跃变化和不同的平移速度进行了多次仿真分析,最终计算出了由系统产生的升力和曳力/推力。
扩展阅读
- 深入了解本文涉及的示例:
- 了解其他用户如何使用 COMSOL Multiphysics 来求解类似的磁悬浮系统
- 浏览电磁设备系列中的其他博客文章
- 如果您想使用 COMSOL Multiphysics 来模拟磁悬浮系统,或者对于手中的建模过程有其他疑问,请随时联系我们
动画演示了 0.6 秒内导电圆盘在两个同心线圈上方的振荡情况。